
|
0 引言
汽车悬架是整车结构中的弹性连接环节,它把路面作用于车轮的支承力、牵引力、制动力和侧向力以及这些力所产生的力矩传递到车身,以保证汽车的正常行驶。悬架的运动学及动力学分析是汽车布置设计运动校核的重要内容之一,其性能是影响汽车平顺性、操纵稳定性等的重要因素。随着汽车行驶速度的不断提高以及人们对汽车行驶舒适性和操纵稳定性等方面的要求提高,悬架系统运动学与动力学研究得到了广泛关注。
文中以某特种越野汽车不等长双横臂独立悬架为例,采用数字化虚拟样机技术和多刚体动力学技术,在三维建模软件Solidworks和机械系统动力学仿真软件ADAMS相结合的基础上,对该悬架系统进行了运动仿真分析,其基本步骤如图1所示。首先,在Solidworks中建立三维模型零件,并在其中进行装配组合;其次,利用ADAMS中“File”的“import”导入在Solidworks中建立三维模型的parasolid文件,并添加复杂的约束和作用力等;接着对模型进行仿真分析;最后对仿真结果进行检验即与物理样机进行比较,如果不满意,则要调整模型或约束等条件,如此反复直到结果满足设计要求为止。
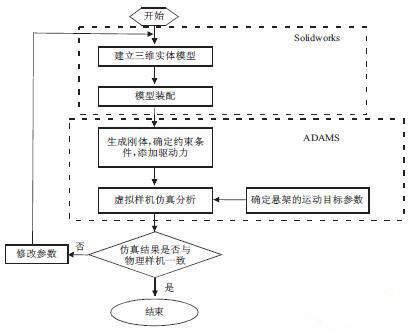 图1 仿真的基础步骤
1 多体系统动力学模型
1.1 多体系统动力学方程
汽车设计中的虚拟样机技术是以多体系统动力学为理论基础的,可采用机械系统仿真软件ADAMS进行双横臂独立悬架运动学分析,应用拉格朗日(Lagrange)乘子方法建立多体系统动力学方程。ADAMS用刚体的质心笛卡尔坐标(x,y,z)和反映刚体方位的欧拉角(φ,θ,ψ)作为广义坐标,即:qi=[x,y,z,φ,θ,ψ]。
根据Lagrange待定乘子法,多刚体动力学方程为
式中:T——系统动能;
Q——系统广义坐标列阵;
φq——绕x轴转角的完整约束;
ρ——对应于完整约束的拉氏乘子列阵;
μ——对应于非完整约束的拉氏乘子列阵。
1.2 双横臂独立悬架模型分析
该重型越野车辆的前悬架为不等长双横臂式独立悬架,图2为双横臂式悬架左悬架的结构示意图。
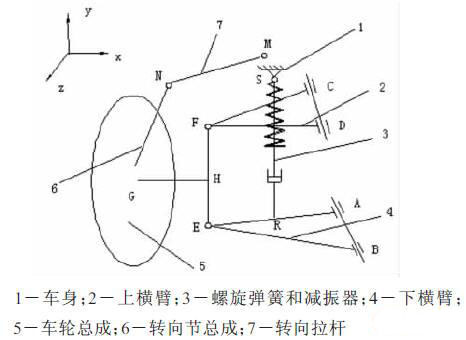 图2 双横臂式悬架左悬架的结构示意图 双横臂式悬架左悬架部分由转向节总成、车轮总成、上横臂、下横臂、转向拉杆、螺旋弹簧和减振器等组成。下横臂一端通过铰接副A和B与车身相连,另一端通过球形副E与转向节总成相连;上横臂一端通过铰接副C和D与车身相连,另一端通过球形副F与转向节总成相连;转向拉杆一端通过球形副N与转向节总成相连,另一端通过万向节M与转向横拉杆相连(在悬架分析时,此处假设是通过球形副M与车身相连);进行悬架的运动学分析时,车轮总成和转向节总成是固定在一起的,车身固定不动。
1.3 在Solidworks中建立三维模型并导入ADAMS
在Solidworks中建立各零件三维实体模型,此时注意建立模型单位设置为“MMKS”,并将各个零件组装成装配图,图3是建立的该车不等长双横臂独立悬架。将建好的悬架模型另存为parasolid格式。
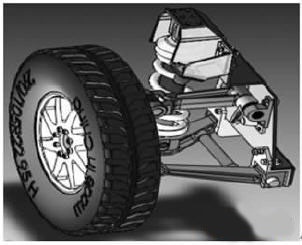 图3 Solidworks中建立的不等长双横臂独立悬架三维实体模型
在ADAMS中选择“import”导入不等长双横臂独立悬架的parasolid文件,并进行零件的重组和重新命名。按照各零件间的运动关系确定约束类型,通过约束将各零件连接起来,从而构成悬架系统结构模型。定义约束时,要注意约束副的方向。定义约束是正确建模的重要步骤,直接关系到系统自由度的合理性。
|
- 1
- 2
- 3
- 4




基于Solidworks与ADAMS重型越野汽车悬架的仿真分析
时间:2015-03-09 13:12来源:未知 作者: 点击:
次
------分隔线----------------------------