
|
(2)创建运动副。为了简化仿真步骤,将其关节间的摩擦、构件的材料特性忽略。定义完成后的模型,如图5所示。
(3)仿真分析。验证摘钩装置电磁吸盘的运动情况并分析是否符合摘钩动作要求。在后处理窗口PostProcessor中分别对电磁吸盘的CM_Position、CM_Velocity、CM_Acceleration进行分析,生成参考点曲线图,如图6~图8所示。
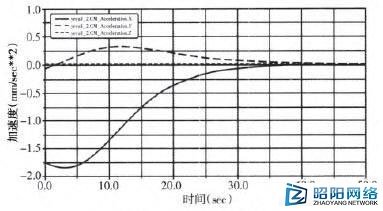 图6 CM_Acceleration曲线图 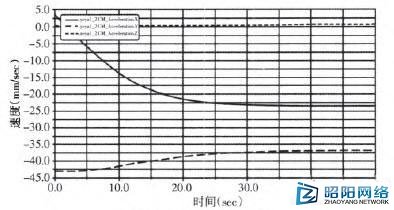 图7 CM_Velocity曲线图 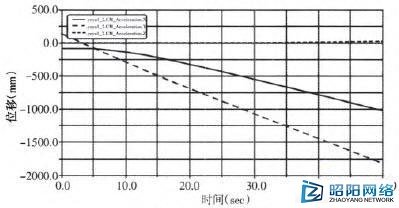 图8 CM Position曲线图
从图6、图7、图8末端执行器上质心的速度、加速度、位置曲线,可以看出该自动摘钩装置在摘钩过程中运行平稳的,并没有出现大的速度、加速度、位置上突变的情况,说明该系统不存在剧烈振动的现象,运行平稳。
6 结论
通过研究编组站的发展历程以及现阶段我国铁路工业化进程,分析并指出我国编组站自动化存在的弊端与改进方式。提出一种采用电液一体化技术摘钩装置即悬挂式自动摘钩装置并对其进行结构设计。其结构采用钢结构设计,经济实用,方便加工。轨道布置在列车车厢的上空,极大的节约了空间,避免了铺设地面轨道时受到地形的影响。最后,通过ADAMS软件对该装置的工作过程进行仿真,很好的证明了该装置运行良好,动作灵敏平稳,对将来摘钩自动化的完成有很好的参考价值。
|
- 1
- 2
- 3
- 4




铁路货运悬挂式自动摘钩装置设计与运动仿真(3)
时间:2014-08-19 10:28来源:万方数据 作者: 点击:
次
------分隔线----------------------------